Embedded
Using an Arduino as a logic analyzer
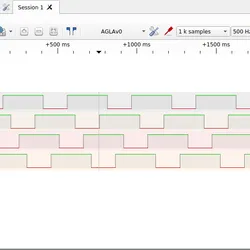
Repurposed an Arduino Uno as a multi-channel logic analyzer to capture and inspect digital signals on ports 8 through 11
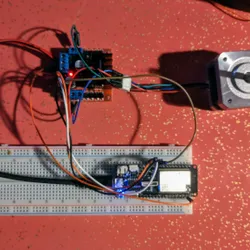
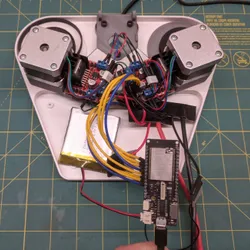
Spinning a Stepper
Set up a reproducible ESP32 ESP-IDF development environment on NixOS by patching Nix packages and debugging the VSCode Espressif extension from source
Driving steppers with the RMT module
Resolved ESP32 RMT looping artifacts by disabling software transmit interrupts before enabling hardware loop mode, achieving precise square wave generation
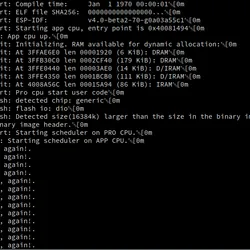
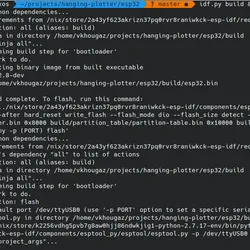
Using Nix to write rust on the esp32
Packaged a reproducible Rust cross-compilation toolchain for ESP32 microcontrollers using custom Nix derivations
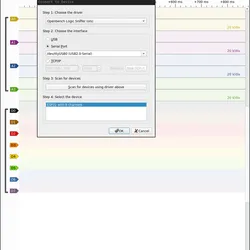
Using an ESP32 as a logic analyzer
Repurposed an ESP32 as a SUMP-compatible logic analyzer by integrating esp32_sigrok with sigrok and Pulseview for capturing stepper motor timing signals
ESP32 development in NixOS using VSCode
Built reproducible Nix derivations for the ESP-IDF SDK and xtensa-esp32 toolchain on NixOS
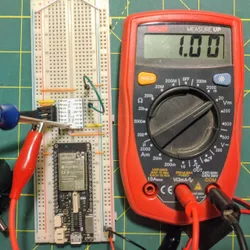
Replaced L298N H-bridge with TMC2208 stepper driver to reduce GPIO overhead, eliminate overheating, and simplify microstepping control

Reverse-engineered a legacy Staübli RX90 robot controller and replaced its failing floppy boot disk with a ZuluSCSI SD card emulator after six disassembly iterations to derive a working boot image

Operating System & Deployment
Replaced fragile WSL serial passthrough with an internally mounted Raspberry Pi, solving persistent driver and USB connectivity issues for embedded robot control
Boot Disk SD Emulation
Replaced fragile floppy-disk boot system with ZuluSCSI SD card emulator to eliminate single point of failure on industrial robot controller