Python


Reverse-engineered a legacy Staübli RX90 robot controller and replaced its failing floppy boot disk with a ZuluSCSI SD card emulator after six disassembly iterations to derive a working boot image
Implementation
2025-6-30
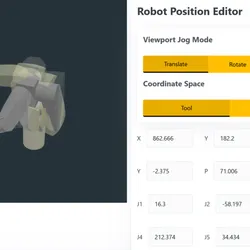
Built web-based robot control interface with visual playback preview using JavaScript motion approximation

Prototype Software
2025-1-9
Built a terminal-based control workflow using Python over RS232 to program a Staubli robot after the teach pendant failed
Specific Solutions LLC
Portland, OR