Javascript

Reverse-engineered a legacy Staübli RX90 robot controller and replaced its failing floppy boot disk with a ZuluSCSI SD card emulator after six disassembly iterations to derive a working boot image
Framework & Dependencies
2025-3-4
Built an 800-line frontend framework using signals and Web Components to implement functional reactive programming for state-driven UI updates
Implementation
2025-6-30
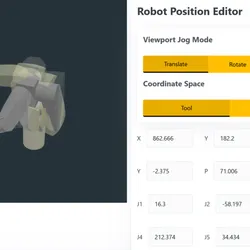
Built web-based robot control interface with visual playback preview using JavaScript motion approximation
Specific Solutions LLC
Portland, OR