Robotics

Transport & Rigging
Acquired and transported a 330KG industrial robot for $1,800 using improvised strapping and winch rigging

Motivation
Revived decades-old industrial robot hardware by emulating legacy SCSI storage with a modern SD card

Framework & Dependencies
Built an 800-line frontend framework using signals and Web Components to implement functional reactive programming for state-driven UI updates
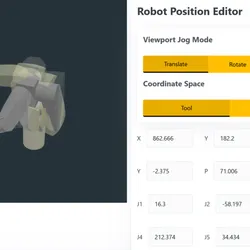
Implementation
Built web-based robot control interface with visual playback preview using JavaScript motion approximation

Operating System & Deployment
Replaced fragile WSL serial passthrough with an internally mounted Raspberry Pi, solving persistent driver and USB connectivity issues for embedded robot control

Prototype Software
Built a terminal-based control workflow using Python over RS232 to program a Staubli robot after the teach pendant failed
Boot Disk SD Emulation
Replaced fragile floppy-disk boot system with ZuluSCSI SD card emulator to eliminate single point of failure on industrial robot controller